Endüstriyel Robot Programlama Nedir?
Endüstriyel robot programlama, bir robotun belirli bir görevi yerine getirmesi için gerekli hareket yollarının, hızların, kuvvetlerin ve proses parametrelerinin tanımlanması sürecidir. Modern üretim tesislerinde robotlar; frezeleme, kaynak, polisaj, kesim, eklemeli imalat ve püskürtme gibi onlarca farklı uygulama alanında kullanılmaktadır. Bu robotların doğru ve verimli şekilde çalışabilmesi, programlama kalitesine doğrudan bağlıdır.
İlgili bağlantılar: ENCY Robot, robot frezeleme ve robot kaynak. Bu konuyla ilgili detaylı sayfaları inceleyebilirsiniz.
Geleneksel CNC tezgahlarından farklı olarak, endüstriyel robotlar genellikle 6 veya daha fazla serbestlik derecesine sahiptir. Bu da robotun uç efektörünü (takım, kaynak torcu, sprey tabancası vb.) uzayda neredeyse sonsuz sayıda pozisyon ve oryantasyonda konumlandırabilmesi anlamına gelir. Ancak bu esneklik, programlama sürecini de daha karmaşık hale getirir. Bir CNC tezgahın 3 veya 5 eksenli programlanmasına kıyasla, 6 eksenli bir robotun hareket planlaması çok daha fazla parametre ve dikkat gerektirir.
Robot programlama süreci temel olarak iki ana kategoriye ayrılır: online (çevrimiçi) programlama ve offline (çevrimdışı) programlama. Her iki yöntemin kendine özgü avantajları, dezavantajları ve uygun kullanım senaryoları vardır. Doğru yöntemin seçilmesi; üretim hacmine, parça karmaşıklığına, proses tipine ve işletmenin dijitalleşme seviyesine bağlıdır.
Endüstriyel robot programlama, yalnızca robotun hareketini tanımlamakla kalmaz; aynı zamanda çarpışma kontrolü, tekillik (singularity) yönetimi, eksen limitleri, kablo ve hortum yönetimi gibi kritik konuları da kapsar. Bu nedenle profesyonel bir robot programlama yazılımı kullanmak, güvenli ve verimli üretimin temel taşıdır.
Online vs Offline Robot Programlama
Robot programlama dünyasında iki temel yaklaşım bulunmaktadır. Bu iki yöntemin anlaşılması, işletmelerin doğru stratejiyi belirlemesi için büyük önem taşır.
Online (Çevrimiçi) Programlama
Online programlama, robotun fiziksel olarak üretim hattında bulunduğu ortamda, teach pendant (öğretme kumandası) veya benzer arayüzler aracılığıyla gerçekleştirilen programlama yöntemidir. Operatör, robotu manuel olarak istenilen pozisyonlara hareket ettirir ve bu noktaları kaydeder. Robot daha sonra bu kayıtlı noktalar arasında programlanan sırayla hareket eder.
Online programlamanın en büyük dezavantajı, programlama süresince robotun üretim yapamamasıdır. Her yeni parça veya program değişikliği için robot durmak zorundadır. Bu durum özellikle yüksek hacimli üretim hatlarında ciddi verimlilik kayıplarına yol açar. Ayrıca karmaşık takım yolları, serbest formlu yüzeyler ve çok sayıda nokta gerektiren uygulamalarda online programlama son derece zaman alıcı ve hata eğilimli hale gelir.
Offline (Çevrimdışı) Programlama
Offline robot programlama, robot programlarının bilgisayar ortamında, robotun fiziksel olarak çalışmasına gerek kalmadan hazırlanmasıdır. CAD/CAM tabanlı yazılımlar kullanılarak robotun sanal bir kopyası (dijital ikiz) üzerinde takım yolları oluşturulur, simüle edilir ve doğrulanır. Hazırlanan program daha sonra robota aktarılarak üretime başlanır.
Offline programlama sayesinde robot, bir program hazırlanırken üretim yapmaya devam edebilir. Bu da robot kullanım oranını (uptime) dramatik şekilde artırır. Özellikle robot frezeleme ve robot kaynak gibi karmaşık takım yolları gerektiren uygulamalarda offline programlama neredeyse zorunludur.
Offline Robot Programlamanın Avantajları
Offline robot programlama, modern üretim tesislerinde giderek daha yaygın hale gelmektedir. Bu yaygınlaşmanın arkasında pek çok somut avantaj bulunur:
- Üretim kesintisi sıfır: Programlama bilgisayar ortamında yapıldığı için robot üretim yapmaya devam eder. Yeni bir parçaya geçiş süresi dakikalarla ölçülür.
- Karmaşık takım yolları: CAD verilerinden otomatik olarak takım yolları üretilebilir. Serbest formlu yüzeyler, çok eksenli hareketler ve binlerce noktadan oluşan yollar kolaylıkla tanımlanır.
- Çarpışma kontrolü ve simülasyon: Programın tamamı sanal ortamda simüle edilerek çarpışma, tekillik, eksen limiti aşımı gibi sorunlar üretim başlamadan tespit edilir ve düzeltilir.
- Tekrarlanabilirlik ve standartlaşma: Programlar dijital ortamda saklanır, versiyonlanır ve gerektiğinde kolayca değiştirilir. Farklı operatörlerin farklı sonuçlar üretmesi riski ortadan kalkar.
- Proses optimizasyonu: Hız profilleri, yaklaşma-uzaklaşma stratejileri ve proses parametreleri bilgisayar ortamında optimize edilir. Gerçek malzeme israfı olmadan en verimli yol bulunur.
- Maliyet düşürme: Daha az deneme-yanılma, daha az fire, daha yüksek robot kullanım oranı ve daha kısa devreye alma süreleri doğrudan maliyet düşüşüne yol açar.
- Güvenlik: Programın doğruluğu sanal ortamda kanıtlandığı için fiziksel ortamda beklenmeyen robot hareketleri riski büyük ölçüde azalır.
- Ölçeklenebilirlik: Aynı program farklı robotlara veya hücrelere kolayca adapte edilebilir. Çoklu robot sistemleri merkezi olarak yönetilebilir.
Robot Programlama Yöntemleri
Endüstriyel robotların programlanmasında kullanılan yöntemler, basit noktadan noktaya öğretmeden gelişmiş CAM tabanlı otomatik yol üretimine kadar geniş bir yelpaze oluşturur. Her yöntemin kendine özgü güçlü yanları ve uygun olduğu uygulama alanları vardır.
Teach Pendant (Öğretme Kumandası) ile Programlama
Teach pendant, robotun kendi kontrol ünitesine bağlı el kumandası ile programlama yapılan en temel yöntemdir. Operatör, robotu fiziksel olarak istenilen pozisyonlara hareket ettirerek noktaları kaydeder. Bu yöntem basit taşıma (pick & place), paletleme ve tekrarlayan montaj işlemleri için uygundur.
Ancak teach pendant ile frezeleme, kaynak dikişi takibi veya yüzey tarama gibi sürekli yol gerektiren uygulamalarda program hazırlamak son derece zordur. Yüzlerce hatta binlerce noktanın elle girilmesi gerekir ve sonuç genellikle istenen kalitede olmaz. Bu nedenle teach pendant, karmaşık uygulamalar için tercih edilen bir yöntem değildir.
Offline CAM Tabanlı Programlama
CAM tabanlı offline robot programlama, günümüzde en gelişmiş ve en verimli programlama yöntemidir. Bu yöntemde parçanın CAD modeli yazılıma aktarılır ve tıpkı bir CNC tezgahı programlar gibi takım yolları oluşturulur. Ancak burada CNC tezgahı yerine robotun kinematik modeli kullanılır.
CAM tabanlı programlamanın en büyük avantajı, karmaşık geometrilerin otomatik olarak işlenebilmesidir. Serbest formlu yüzeyler üzerinde tarama yolları, kaynak dikişleri boyunca sürekli yollar veya kesim konturları CAD verisinden doğrudan türetilebilir. Ency CAM yazılımı, hem CNC hem de robot programlama için aynı güçlü CAM çekirdeğini kullanarak bu süreci son derece etkin hale getirir.
CAM tabanlı offline programlama özellikle robot frezeleme, robot kaynak programlama, robot kesim ve robot eklemeli imalat gibi sürekli yol gerektiren uygulamalarda vazgeçilmezdir.
Simülasyon Tabanlı Programlama
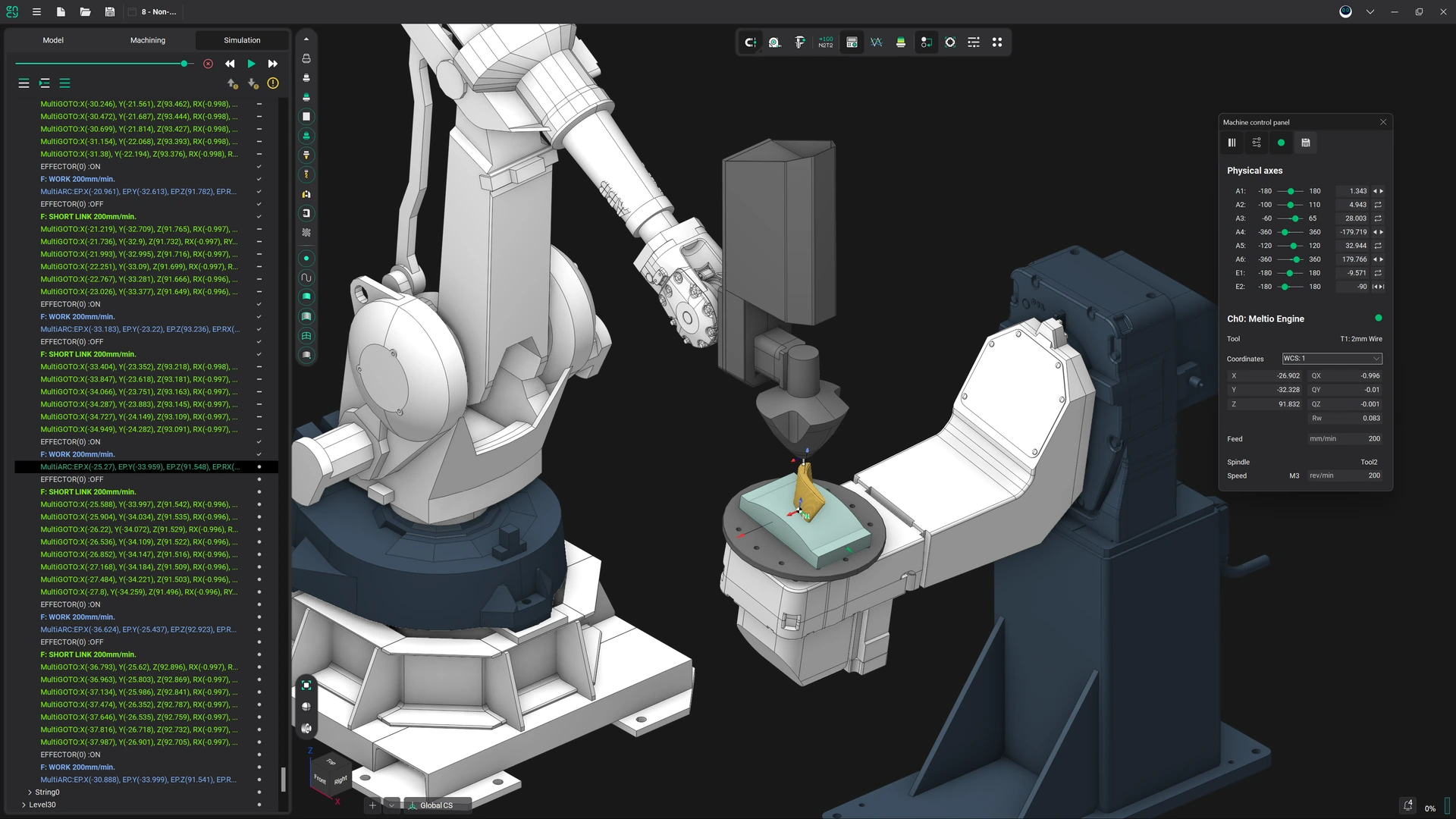
Simülasyon tabanlı programlama, oluşturulan takım yollarının sanal ortamda robotun tam kinematik modeli üzerinde çalıştırılarak doğrulanmasıdır. Gerçekçi bir simülasyon ortamında robot, fikstür, iş parçası, takım ve çevre elemanları modellenmiş olarak yer alır. Program çalıştırıldığında robotun her hareketi görselleştirilir ve olası sorunlar tespit edilir.
Simülasyon sırasında kontrol edilen başlıca parametreler şunlardır: çarpışma kontrolü (robot-parça, robot-fikstür, robot-çevre), eksen limitleri (her eksenin mekanik hareket sınırları), tekillik bölgeleri (robotun kinematik olarak belirsizleştiği pozisyonlar), erişilebilirlik (robotun hedef noktaya ulaşıp ulaşamayacağı), kablo ve hortum yönetimi ve çevrim süresi tahmini. Profesyonel offline programlama yazılımları, bu kontrolleri otomatik olarak gerçekleştirir ve sorunlu bölgeleri raporlar.
Robot Uygulama Alanları
Endüstriyel robotlar, geniş çalışma alanları ve çok eksenli hareket kabiliyetleri sayesinde pek çok farklı üretim prosesinde kullanılmaktadır. Her uygulama alanı, kendine özgü programlama gereksinimleri ve zorlukları barındırır.
Robot Frezeleme
Robot frezeleme, endüstriyel robotların yüksek devirli spindle ile donatılarak talaşlı imalat yapması prosesidir. CNC tezgahlara kıyasla robotlar çok daha büyük çalışma alanı sunar, bu da büyük parçaların tek bağlamada işlenmesini mümkün kılar. Özellikle kompozit malzemelerin kenarlarının düzeltilmesi (trimming), kalıp modellerinin frezelenmesi, ahşap ve köpük gibi yumuşak malzemelerin şekillendirilmesi ve büyük havacılık parçalarının işlenmesi gibi alanlarda robot frezeleme yaygın olarak tercih edilmektedir.
Robot frezeleme programlamasında CAM tabanlı offline yöntem neredeyse zorunludur. Karmaşık yüzey geometrileri, sürekli ve pürüzsüz takım yolları gerektirir. Ayrıca robotun rijitlik sınırlamalarından kaynaklanan titreşim ve sapma gibi etkiler göz önünde bulundurulmalı, ilerleme hızları ve kesme derinlikleri buna göre optimize edilmelidir.
Robot Kaynak Programlama
Robot kaynak, endüstriyel robotların en yaygın kullanım alanlarından biridir. MIG/MAG, TIG, plazma, lazer ve sürtünme karıştırma kaynağı gibi farklı kaynak yöntemleri robotlarla uygulanabilir. Robot kaynak programlama, kaynak torçunun dikişi boyunca doğru açı, hız ve mesafede ilerlemesini sağlayan hareket yollarının tanımlanmasını kapsar.
Kaynak programlamada dikkat edilmesi gereken kritik parametreler arasında torç açısı (work angle ve travel angle), kaynak hızı, tel besleme hızı, gaz debisi ve kaynak başlangıç/bitiş stratejileri yer alır. Offline programlama sayesinde bu parametreler sanal ortamda optimize edilir ve dikişin her noktasında tutarlı kaynak kalitesi sağlanır. Özellikle çok dikişli karmaşık kaynaklı yapılarda offline programlama, zamandan büyük tasarruf sağlar.
Robot Polisaj
Robot polisaj, yüzey kalitesinin kritik olduğu uygulamalarda robotların zımparalama, cilalama ve parlatma işlemlerini gerçekleştirmesidir. Otomotiv gövde parçaları, paslanmaz çelik mutfak ekipmanları, hijyen sektörü ürünleri ve dekoratif metal parçalar gibi alanlarda yaygındır. Robot polisaj programlaması, kuvvet kontrolü ve yüzey takibi gerektirdiği için özellikle hassas bir programlama sürecine ihtiyaç duyar.
Polisaj uygulamalarında robotun yüzeye uyguladığı basınç, yüzey boyunca ilerleme hızı ve polisaj diskinin/bandının temas açısı kritik parametrelerdir. CAM tabanlı offline programlama, yüzey normallerini otomatik olarak hesaplayarak takımın her noktada doğru açıyla temas etmesini sağlar.
Robot Kesim
Robot kesim, lazer, plazma veya su jeti gibi kesim teknolojilerinin robot üzerine entegre edilmesiyle gerçekleştirilir. Boru ve profil kesimi, sac kesim, 3 boyutlu kontur kesimi ve kompozit malzeme kesimi gibi alanlarda yaygın olarak kullanılır. Robotun geniş çalışma alanı, özellikle büyük parçaların ve karmaşık 3B konturların kesilmesinde büyük avantaj sağlar.
Kesim programlamasında, kesim hızı, odak mesafesi (lazer için), standoff mesafesi, pierce (delme) noktaları ve lead-in/lead-out stratejileri kritik parametrelerdir. Offline CAM tabanlı programlama, CAD modeli üzerindeki konturları otomatik olarak tespit ederek kesim yollarını oluşturur ve robotun tüm eksenlerde düzgün hareket etmesini garanti eder.
Robot Eklemeli İmalat
Robot eklemeli imalat (additif manufacturing), malzemenin katman katman eklenerek parça oluşturulduğu üretim yöntemidir. WAAM (Wire Arc Additive Manufacturing), DED (Directed Energy Deposition) ve beton baskı gibi prosesler robotlarla uygulanmaktadır. Robotun 6 eksenli esnekliği, sadece düz katmanlar yerine eğimli ve çok yönlü biriktirme stratejilerine olanak tanır.
Eklemeli imalat programlamasında katman yüksekliği, biriktirme hızı, malzeme besleme oranı ve soğuma süreleri gibi parametrelerin hassas kontrolü gerekir. Offline programlama, 3B CAD modelinden dilimleme ve yol planlamasını otomatik olarak gerçekleştirerek karmaşık geometrilerin hızla üretilmesini sağlar.
Robot Püskürtme
Robot püskürtme, termal püskürtme, boya, jelkot, seramik kaplama ve toz kaplama gibi yüzey kaplama proseslerinin robot ile uygulanmasıdır. Homojen kaplama kalınlığı elde etmek için robotun yüzey üzerinde sabit hız ve mesafede, düzgün bir tarama deseniyle hareket etmesi gerekir.
Püskürtme programlamasında sprey tabancasının yüzeye olan mesafesi, sprey açısı, örtüşme oranı (overlap), geçiş hızı ve sprey deseni (fan pattern) kritik parametrelerdir. Offline programlama, CAD yüzeyi üzerinde otomatik tarama yolları oluşturarak her noktada eşit kaplama kalınlığı sağlar. Bu, manuel programlama ile elde edilmesi neredeyse imkansız bir hassasiyet düzeyidir.
Robot CAM Yazılımı Seçim Kriterleri
Doğru robot CAM yazılımını seçmek, offline programlamanın başarısı için kritik bir karardır. Piyasada pek çok farklı çözüm bulunmakla birlikte, kaliteli bir robot CAM yazılımında aranması gereken temel özellikler şunlardır:
- Geniş robot marka desteği: Yazılım; ABB, KUKA, Fanuc, Yaskawa, Kawasaki, Staubli, Universal Robots ve diğer yaygın robot markalarını desteklemelidir. Kinematik modeller ve post-processor'lar hazır olarak sunulmalıdır.
- Güçlü CAM çekirdeği: Frezeleme, kaynak, kesim gibi farklı prosesler için gelişmiş takım yolu stratejileri sunmalıdır. CAD verisinden otomatik yol üretimi desteklenmelidir.
- Gerçekçi simülasyon: Robotun tam kinematik modeli ile birlikte fikstür, parça ve çevre elemanlarının dahil edildiği gerçekçi bir simülasyon ortamı sağlanmalıdır.
- Otomatik çarpışma kontrolü: Simülasyon sırasında robot-parça, robot-fikstür ve robot-çevre çarpışmaları otomatik olarak tespit edilmeli ve raporlanmalıdır.
- Tekillik ve eksen limiti yönetimi: Robotun tekillik bölgelerine girişi önlenebilmeli, eksen limitlerinin aşılması durumunda otomatik uyarı verilmeli veya alternatif konfigürasyonlar sunulmalıdır.
- Çoklu robot ve pozisyoner desteği: Birden fazla robotun ve dış eksenlerin (döner tabla, lineer ray, pozisyoner) koordineli çalışması programlanabilmelidir.
- Post-processor esnekliği: Farklı robot kontrolcüleri için özelleştirilebilir post-processor'lar ile doğru ve optimize edilmiş robot kodu üretilmelidir.
- CAD entegrasyonu: STEP, IGES, Parasolid, CATIA, SolidWorks gibi yaygın CAD formatlarının doğrudan içe aktarılabilmesi gereklidir.
- Kullanıcı dostu arayüz: Öğrenme eğrisinin makul olması, sezgisel iş akışları ve kapsamlı dokümantasyon sunulması önemlidir.
Ency Robot ile Offline Programlama
Ency Robot, TMS Teknoloji tarafından sunulan profesyonel offline robot programlama çözümüdür. Ency CAM'in güçlü CAM çekirdeği üzerine inşa edilen Ency Robot, endüstriyel robotlar için kapsamlı bir programlama, simülasyon ve doğrulama platformu sunar.
Ency Robot'un öne çıkan özellikleri şunlardır:
- CAM tabanlı yol üretimi: Ency CAM ile aynı güçlü takım yolu stratejilerini robot uygulamalarına taşır. Frezeleme, kaynak, kesim, polisaj, eklemeli imalat ve püskürtme için optimize edilmiş stratejiler sunar.
- Geniş robot kütüphanesi: ABB, KUKA, Fanuc, Yaskawa, Kawasaki, Staubli ve daha pek çok markanın robot modelleri hazır olarak kütüphanede yer alır. Özel robot konfigürasyonları da tanımlanabilir.
- ENCY Hyper ile gerçek zamanlı simülasyon: Ency Robot'un entegre simülasyon motoru, programın tamamını gerçekçi bir 3B ortamda görselleştirir. Çarpışma kontrolü, erişilebilirlik analizi ve çevrim süresi tahmini otomatik olarak gerçekleştirilir.
- Çoklu robot ve dış eksen koordinasyonu: Birden fazla robot, döner tablalar, lineer raylar ve pozisyonerlerin senkronize çalışması tek bir ortamda programlanabilir.
- Otomatik tekillik çözümü: Robot tekillik bölgelerine yaklaştığında otomatik kaçınma stratejileri devreye girer. Eksen konfigürasyon değişiklikleri optimize edilir.
- Hazır post-processor'lar: Yaygın robot kontrolcüleri (ABB RAPID, KUKA KRL, Fanuc TP/Karel, Yaskawa Inform vb.) için doğrulanmış post-processor'lar sunulur.
- Proses özel parametreler: Her uygulama tipi için proses özel parametre tanımları yapılabilir. Kaynak parametreleri, kesim koşulları veya püskürtme ayarları takım yoluna entegre edilir.
Ency Robot, özellikle robot frezeleme uygulamalarında CNC kalitesinde takım yolları üretir. Robotun kinematik sınırlamalarını göz önünde bulundurarak optimize edilmiş yollar sayesinde yüzey kalitesi ve boyutsal hassasiyet en üst düzeye çıkarılır. Robot kaynak programlama için ise dikiş takibi, çoklu pas yönetimi ve kaynak parametresi entegrasyonu gibi özellikler sunulur.
Sektörel Uygulamalar
Endüstriyel robot programlama, pek çok farklı sektörde kritik üretim süreçlerinin vazgeçilmez bir parçası haline gelmiştir. Her sektör, robotlardan farklı beklentiler ve uygulama gereksinimleri ile yararlanmaktadır.
Otomotiv Sektörü
Otomotiv sektörü, endüstriyel robotların en yoğun kullanıldığı alandır. Gövde kaynak hatları, boya kabinleri, motor montaj istasyonları ve kalite kontrol hücrelerinde yüzlerce robot koordineli olarak çalışmaktadır. Özellikle gövde kaynak hatlarında robotların hassas ve tekrarlanabilir şekilde programlanması, araç kalitesini doğrudan etkiler. Offline programlama, yeni model geçişlerinde hat duruş süresini minimuma indirerek üretim esnekliğini artırır.
Otomotiv yan sanayiinde ise egzoz sistemleri, şasi parçaları, süspansiyon bileşenleri ve dekoratif parçaların üretiminde robot frezeleme, kaynak ve polisaj uygulamaları yaygındır. Küçük ve orta ölçekli tedarikçiler, offline programlama sayesinde hızla yeni parçalara geçiş yapabilmekte ve OEM müşterilerinin değişen taleplerine çevik şekilde yanıt verebilmektedir.
Havacılık ve Uzay Sektörü
Havacılık sektörü, yüksek hassasiyet ve güvenilirlik gereksinimleri nedeniyle robot programlamada en titiz uygulamaların yapıldığı alandır. Büyük gövde panellerinin frezelenmesi, kompozit parçaların kesilmesi ve düzeltilmesi (trimming), büyük yapısal elemanların kaynaklanması ve termal püskürtme kaplama gibi uygulamalarda robotlar kritik rol oynar.
Havacılık parçaları genellikle büyük boyutlu, karmaşık geometrili ve pahalı malzemelerden üretilir. Bu nedenle hata toleransı son derece düşüktür. Offline programlama ve simülasyon, ilk parçadan doğru sonuç alınmasını sağlayarak malzeme israfını ve tekrar işleme maliyetlerini minimize eder. Ayrıca havacılık sektöründe zorunlu olan izlenebilirlik ve dokümantasyon gereksinimleri, dijital programlama altyapısı ile kolayca karşılanır.
Gemi İnşa Sektörü
Gemi inşa sektöründe robotlar; büyük panel kaynak, boru kaynak, kumlama, boya ve kesim uygulamalarında kullanılmaktadır. Gemi yapımında parçalar genellikle çok büyük boyutludur ve tekil üretim veya küçük seriler şeklinde imal edilir. Bu da her parça için yeni bir programın hızla hazırlanmasını gerektirir.
Offline robot programlama, gemi inşa sektöründe özellikle büyük panel kaynak ve profil kesim uygulamalarında büyük verimlilik artışı sağlar. CAD verilerinden otomatik olarak oluşturulan kaynak ve kesim programları, deneyimli kaynakçı ve operatör bağımlılığını azaltır ve üretim hızını artırır.
Enerji Sektörü
Enerji sektöründe rüzgar türbini kanatlarının üretimi ve onarımı, boru hattı kaynağı, basınçlı kap imalatı ve nükleer tesislerde uzaktan bakım gibi uygulamalarda robotlar kullanılmaktadır. Özellikle rüzgar türbini kanatları, büyük boyutları (60 metre ve üzeri) ve karmaşık aerodinamik profilleri nedeniyle robot programlama açısından zorlu uygulamalardır.
Bu sektörde robotlar; frezeleme, zımparalama, yapıştırıcı uygulama, boya ve muayene gibi farklı proseslerde görev alır. Offline programlama, bu çok yönlü uygulamaların verimli bir şekilde yönetilmesini sağlar. Ayrıca enerji sektöründeki büyük parçalar için robotun geniş çalışma alanı, CNC tezgahlara göre önemli bir avantajdır.
Robot Programlamada Gelecek Trendleri
Endüstriyel robot programlama alanı hızla gelişmeye devam etmektedir. Yapay zeka destekli otomatik yol planlama, bulut tabanlı programlama platformları, artırılmış gerçeklik ile yerinde doğrulama, dijital ikiz tabanlı sürekli optimizasyon ve kolay kullanımlı arayüzler sayesinde robot programlama giderek daha erişilebilir hale gelmektedir.
Sensör entegrasyonu ve uyarlanabilir programlama da önemli bir trend olarak öne çıkmaktadır. Robotun gerçek zamanlı sensör verilerini (kuvvet, görüntü, lazer tarama) kullanarak programını dinamik olarak uyarlaması, özellikle kaynak, polisaj ve muayene uygulamalarında kaliteyi artırmaktadır. Offline programlama yazılımları da bu sensör verilerini simülasyon ortamına entegre ederek daha gerçekçi sonuçlar sunmaya başlamaktadır.
Kobot (kollaboratif robot) uygulamalarının yaygınlaşması da programlama yaklaşımlarını değiştirmektedir. İnsan-robot iş birliği senaryoları, güvenlik bölgeleri ve hız sınırlamalarının programlamaya entegre edilmesini gerektirmektedir. Bu alanda da offline programlama yazılımları kritik bir rol üstlenmektedir.
Sonuç
Robot programlama, endüstriyel üretimin dijitalleşme yolculuğunda stratejik bir yetkinliktir. Online programlamanın sınırlamalarını aşan offline robot programlama, üretim verimliliğini artıran, maliyetleri düşüren ve kaliteyi yükselten güçlü bir teknolojidir. Özellikle robot frezeleme, robot kaynak programlama, polisaj, kesim, eklemeli imalat ve püskürtme gibi karmaşık uygulamalarda offline CAM tabanlı programlama, artık bir tercih değil bir zorunluluktur.
Ency Robot, TMS Teknoloji'nin sunduğu kapsamlı offline robot programlama çözümü ile endüstriyel robotlarınızın tam potansiyelini ortaya çıkarmanızı sağlar. Güçlü CAM çekirdeği, geniş robot kütüphanesi, gerçekçi simülasyon ortamı ve kullanıcı dostu arayüzü ile Ency Robot, her ölçekteki üretim işletmesi için ideal bir çözümdür.
Doğru yazılım seçimi, doğru programlama yöntemi ve doğru uygulama stratejisi ile endüstriyel robotlarınızdan maksimum verim alabilirsiniz. Robotlu üretim süreçlerinizi bir üst seviyeye taşımak, üretim maliyetlerinizi düşürmek ve rekabet gücünüzü artırmak için profesyonel offline programlama dünyasına adım atmanın tam zamanı.
Ency Robot hakkında daha fazla bilgi almak, demo talep etmek veya uzman ekibimizle üretim süreçlerinizi değerlendirmek için bizimle iletişime geçin.